
Биологи осваивают сингулярности
Повышение скорости фиксации атомно-молекулярных трансформаций позволит быстрее создавать новые лекарства. Сегодня речь идет о чтении одиночных цепей ДНК, для чего их пропускают сквозь поры.
Создан биоробот из клеток взрослого человека
Андроботы способны регенерировать даже нервные волокна. Преимущество новой технологии в том, что андроботы делаются из собственных клеток человека, это снимает опасность их отторжения иммунной системой.
Определение свойств тела по реологическим характеристикам
Для выбора модели, описывающей механическое поведение того или иного реального тела, необходимо знать, какими реологическими свойствами оно обладает.
Реологические свойства тела определяют обычно с помощью приборов, исходя из характеристик упругости, вязкости и пластичности. Однако наиболее простой метод определения реологических характеристик реального тела заключается в построении кривых кинетики деформаций и кривых релаксации напряжений. По этим кривым можно найти модуль мгновенной и запаздывающей упругости, коэффициент динамической вязкости, предел текучести, упругости и прочности, т. е. все данные, характеризующие упругие, вязкие и пластические свойства тел.
Перечисленные константы позволяют объединить деформационное поведение материала и достаточно полно характеризовать его структурно-механические свойства. Под кривыми кинетики деформаций понимается изменение деформации тела с течением времени при постоянном напряжении, а под кривы ми релаксации напряжения – изменение напряжения в теле с течением времени при постоянной деформации.
При снятии кривых кинетики де формаций необходимо правильно вы брать величину напряжения, поскольку при большом напряжении в вяз ком теле возникает большая скорость деформации, которую можно ошибочно принять за мгновенную упругую деформацию.
Кинетика деформации тела рыбы.
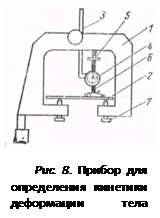 Экспериментальные исследования для построения кривых кинетики деформаций и диаграммы развития восстановительных деформаций в теле рыбы после снятия напряжения были проведены на приборе, показанном на рис. 8. К головке 1 посредством ползуна 3 присоединяют платформу 5, на которой устанавливают груз, а к нижнему его концу крепят наконечник 6. На винты 7, соединенные с головкой 1, устанавливают плоскость 2.
Экспериментальные исследования для построения кривых кинетики деформаций и диаграммы развития восстановительных деформаций в теле рыбы после снятия напряжения были проведены на приборе, показанном на рис. 8. К головке 1 посредством ползуна 3 присоединяют платформу 5, на которой устанавливают груз, а к нижнему его концу крепят наконечник 6. На винты 7, соединенные с головкой 1, устанавливают плоскость 2.
Опыты по определению изменений деформаций в теле рыбы при постоянном напряжении проводили в следующей последовательности. Рыбу укладывали на плоскость 2. Ползун 3 с индикатором перемещали таким образом, чтобы шток индикатора касался тела рыбы, а стрелка индикатора совмещалась с нулевой отметкой 4. На платформу 5 укладывали груз и шток погружали в тело рыбы. Время погружения штока на соответствующую глубину фиксировалось секундомером через 0, 5, 10, 20, 30, 40, 60/120 и 180 с.
Наконечник 6 имел плоскую цилиндрическую поверхность. Груз, укладываемый на платформу 5, выбирали таким образом, чтобы напряжение между наконечником и рыбой было 65•102 Н/м2.
Поскольку внутри индикатора имеется пружина, препятствующая перемещению штока, была снята характеристика пружины, и усилие, необходимое для сжатия пружины, было учтено при определении напряжения между наконечником и штоком. Колебание напряжения не превышало 6%.
По истечении 180 с груз снимали и фиксировали восстановительную деформацию в теле рыбы. В связи с тем что визуально зафиксировать величину восстановительной деформации трудно, применяли следующий метод. Рыбу укладывали на платформу весов и уравновешивали гирями. Затем платформу фиксировали от перемещения и рыбу нагружали через индикатор постоянной силой по методике, описанной выше. После снятия нагружения платформа весов освобождается от фиксации и весы оказываются уравновешенными, т. е. качания весов не происходит. Теперь представляется возможным фиксировать восстановительную деформацию, поскольку касание рыбы к наконечнику индикатора фиксируется чувствительными весами.
1 2
- Эволюция человека
- Полиплоидия
- Питание и пища
- Первозвери
- Общая геронтология
- Ноосфера и биосфера
- Материалы
Волокна с «самосознанием»
В организме клетки «сидят» на волокнистой подложке-матриксе, препятствующей клеточной инвазии (инвазивному росту). То есть образованию метастаз. Вместе с тем в ходе внутриутробного развития клетки передвигаются. У них появляются отростки, длина которых может достигать метра (как в случае седалищного нерва).